Im MakerSpace Schwerte wurde gemeinsam mit Jugendlichen im Alter von 13 bis 17 Jahren ein CNC-basierter Pen Plotter realisiert.
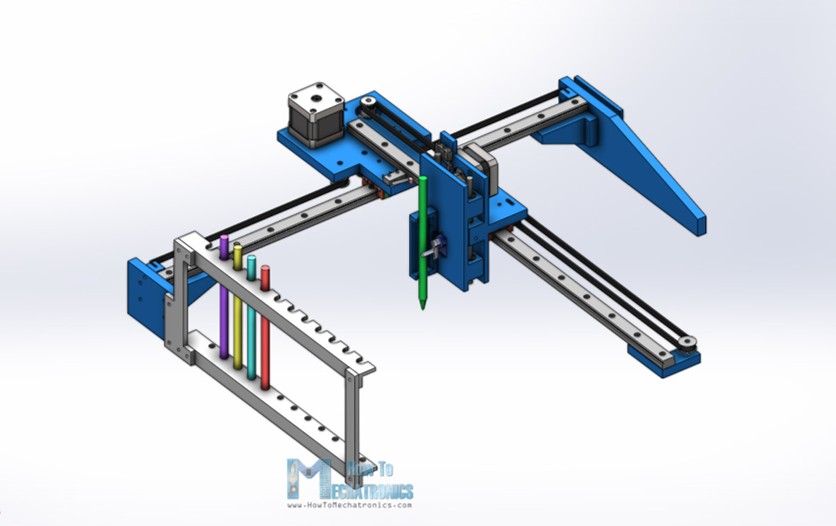
Als technische Grundlage diente eine Internetvorlage von „How to Mechatronics“:
https://howtomechatronics.com/projects/diy-pen-plotter-with-automatic-tool-changer-cnc-drawing-machine/
Diese wurde jedoch nicht einfach nachgebaut, sondern bewusst angepasst, weiterentwickelt und konstruktiv hinterfragt.
Das Projekt war offen und experimentell angelegt. Im Mittelpunkt stand nicht eine möglichst schnelle Fertigstellung, sondern das praktische Erlernen mechatronischer Zusammenhänge durch Ausprobieren, Testen und iterative Verbesserungen.
Mechanischer Aufbau – Lernen durch Iteration
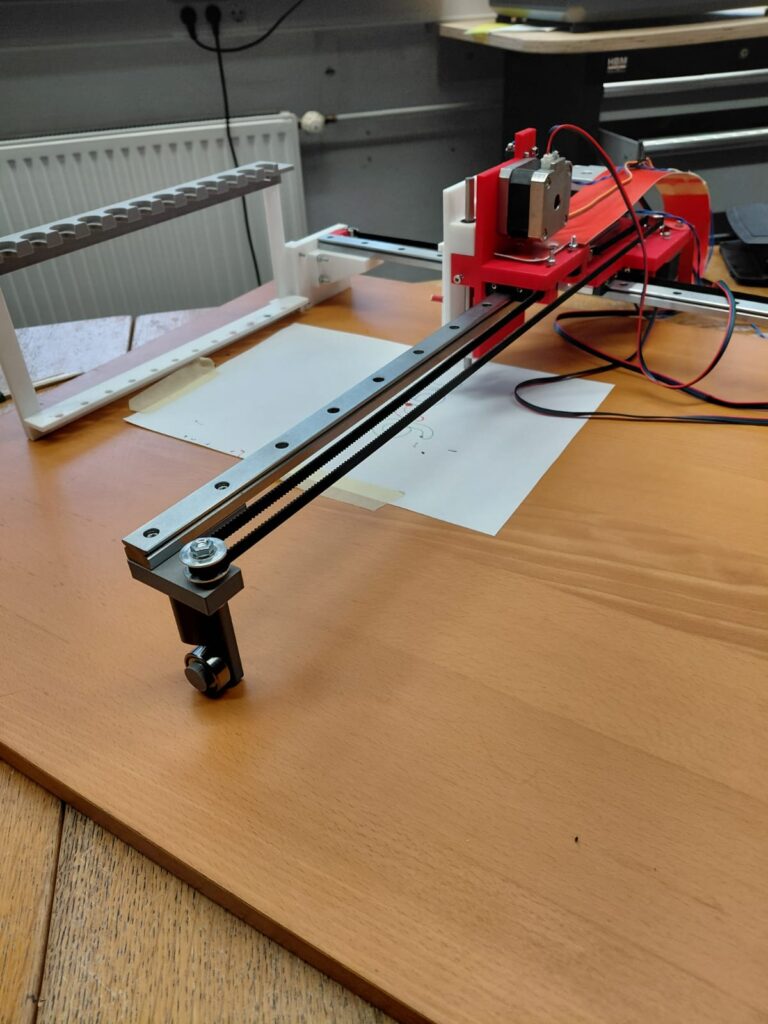
Die mechanischen Komponenten – Linearschienen, Zahnriemenantrieb und Schrittmotoren – wurden schrittweise montiert.
Die eingesetzten Schrittmotoren stammen aus ausrangierten 3D-Druckern aus dem Bestand des MakerSpace und wurden für das Projekt technisch geprüft und neu parametriert.
Dabei zeigte sich schnell, wie entscheidend die Montageabfolge ist.
Mehrfach mussten Baugruppen erneut demontiert werden, da:
- Schrauben nicht zugänglich waren
- sich eine andere Reihenfolge als sinnvoller erwies
Diese Iterationen waren kein Rückschritt, sondern ein zentraler Bestandteil des Lernprozesses.
Die 3D-gedruckten Bauteile wurden überwiegend von jüngeren Teilnehmern gefertigt. Einige Komponenten mussten mehrfach gedruckt werden, da sich erst im praktischen Einsatz konstruktive Schwächen zeigten.


Mechanische Optimierungen
Im Verlauf des Projekts wurden mehrere konstruktive Verbesserungen umgesetzt:
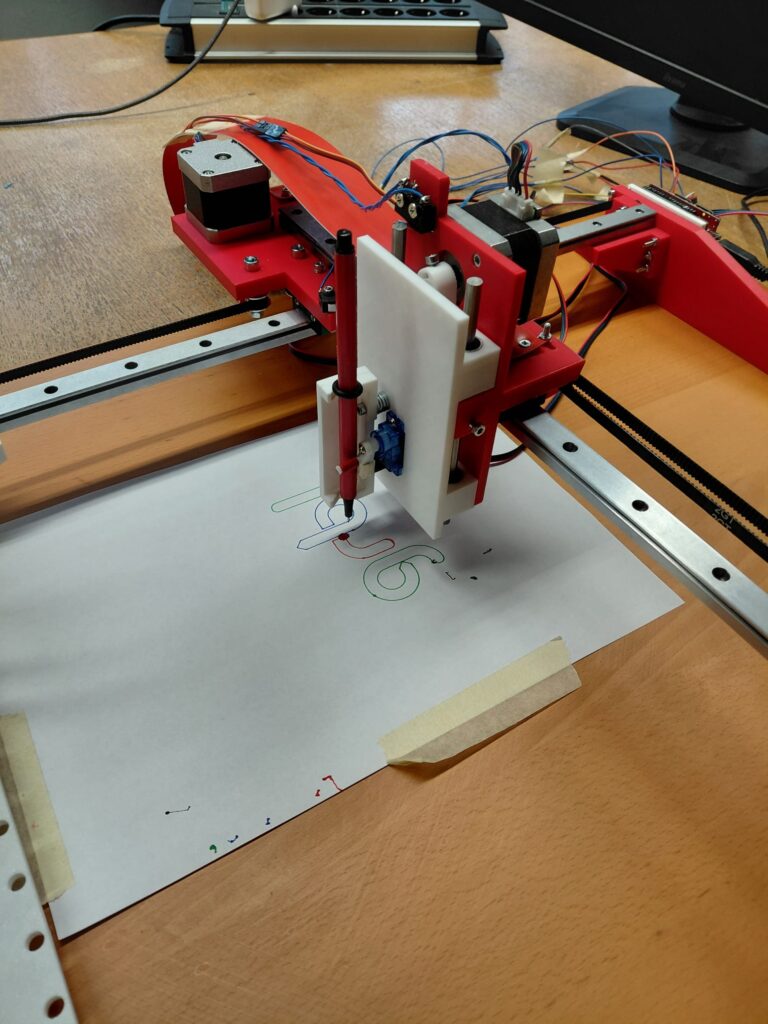
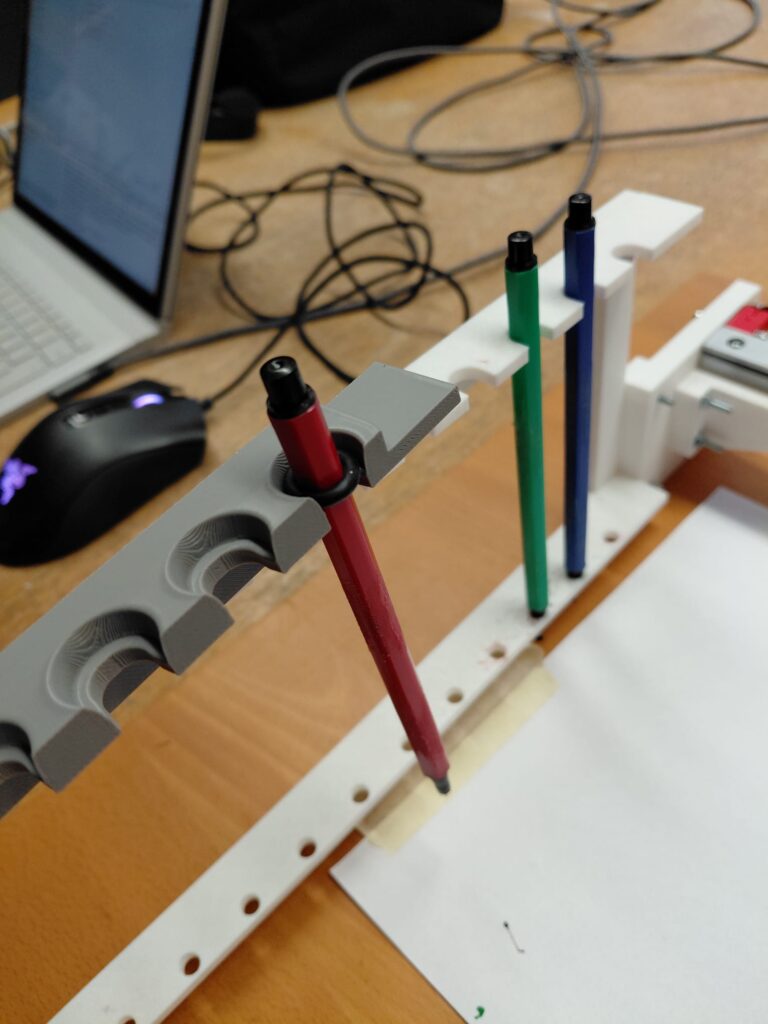
- Entfernung unnötiger Federn aus dem ursprünglichen Design, da das Eigengewicht des Stifthalters ausreichend war, um die Stifte sicher und gleichmäßig auf das Papier zu drücken.
- Überarbeitung des Stifthalters, da die verwendeten Stifte im Originaldesign nicht ausreichend fixiert wurden.
- Ergänzung einer mitlaufenden Stütze zur Stabilisierung eines freitragenden Auslegers.
Diese Stütze ist mit einem Kugellager ausgestattet, wodurch eine leichtgängige Bewegung gewährleistet wird. Die Maßnahme führte zu einer deutlichen Erhöhung der Gesamtstabilität.

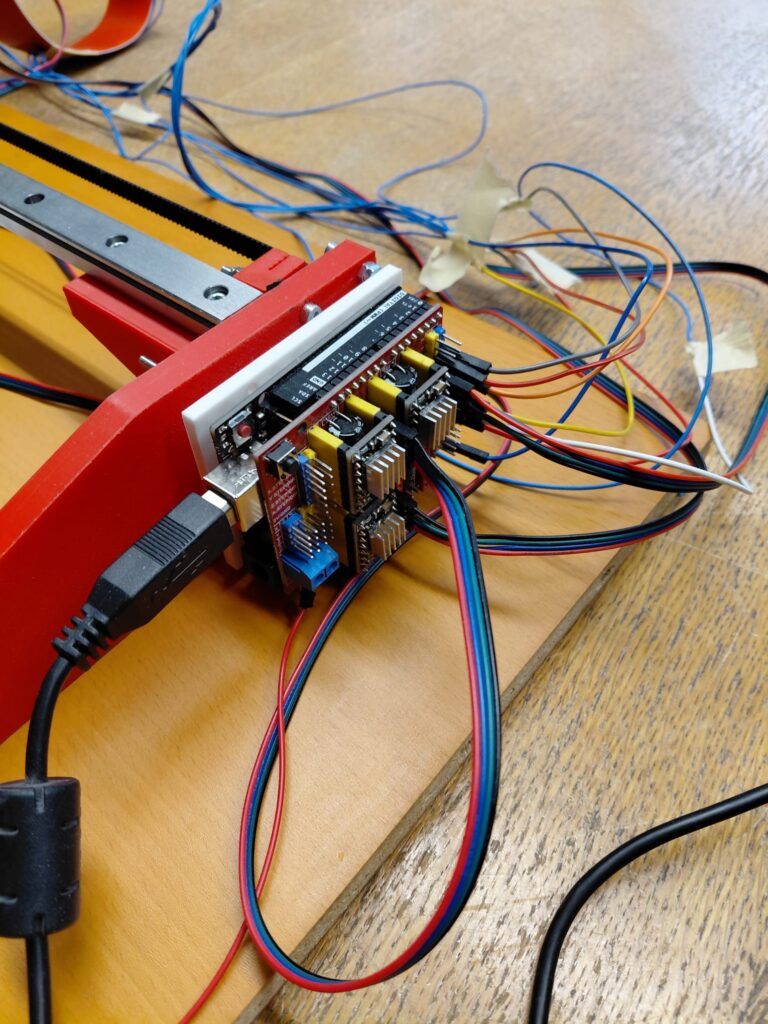
Elektronik und Hardware – praktische Erfahrungen mit Motortreibern
Parallel zum mechanischen Aufbau erfolgte die Verdrahtung der Hardware. Dazu gehörten:
- Verbindung der Schrittmotoren mit der Steuerplatine
- Einbau der Motortreiber
- Signalführung zwischen Controller und Endstufen
Während der Inbetriebnahme wurde deutlich, wie sensibel das Zusammenspiel von Motor, Treiber und Versorgungsspannung ist.
Ein Motortreiber entwickelte im Testbetrieb eine deutlich erhöhte Temperatur. Dies machte eine präzise Abstimmung der Strombegrenzung sowie eine Anpassung der Treibereinstellungen erforderlich.
Diese Erfahrung vermittelte praxisnah grundlegende Kenntnisse im Bereich:
- Leistungselektronik
- thermischer Belastung elektronischer Bauteile
Integration und Anpassung des Stiftwechselsystems
Die grundlegenden Bewegungsparameter wie Schrittauflösung, Vorschubgeschwindigkeit und Beschleunigungswerte konnten unverändert übernommen werden.
Der Schwerpunkt der Softwareanpassung lag auf der Integration und Kalibrierung des vorhandenen Stiftwechselsystems. Dieses wurde sowohl mechanisch als auch softwaretechnisch an die tatsächlich verwendeten Stifte angepasst.
Dazu gehörten:
- präzises Einmessen der Stiftpositionen
- Kalibrierung der Anfahrpunkte
- Anpassung der Servo-Positionen für Aufnahme und Ablage
- Definition sicherer Verfahrwege für den Werkzeugwechsel
Mehrere Testläufe waren erforderlich, um eine zuverlässige Funktion sicherzustellen.
Dabei zeigte sich besonders deutlich das enge Zusammenspiel zwischen Mechanik und Steuerungslogik.
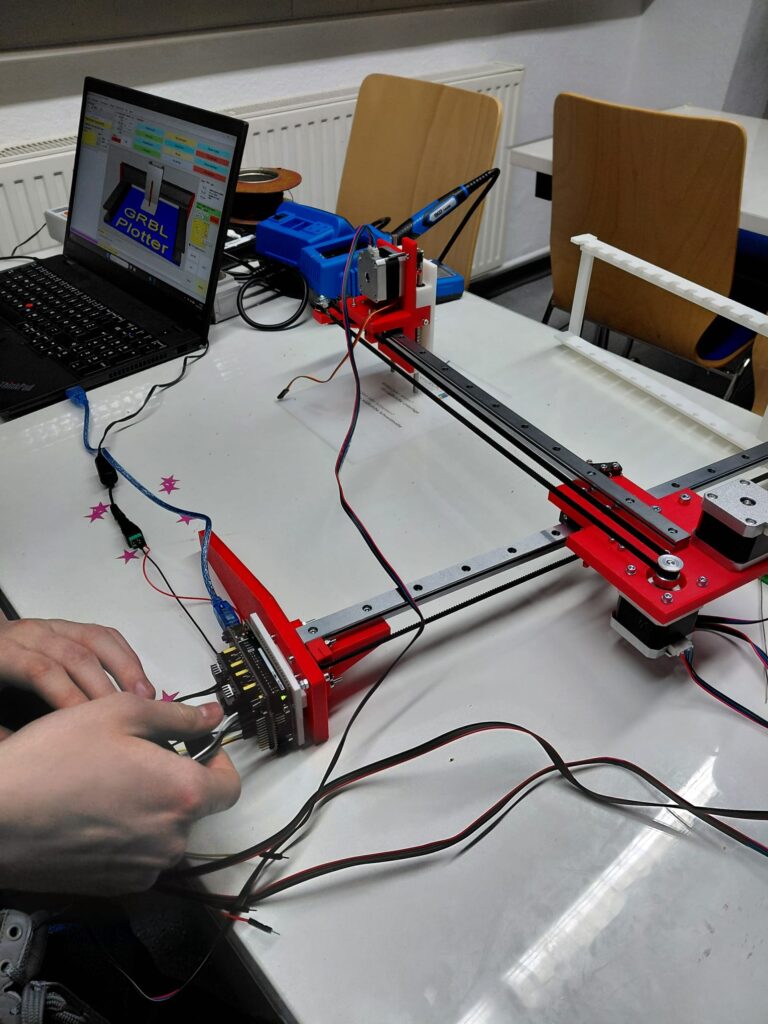
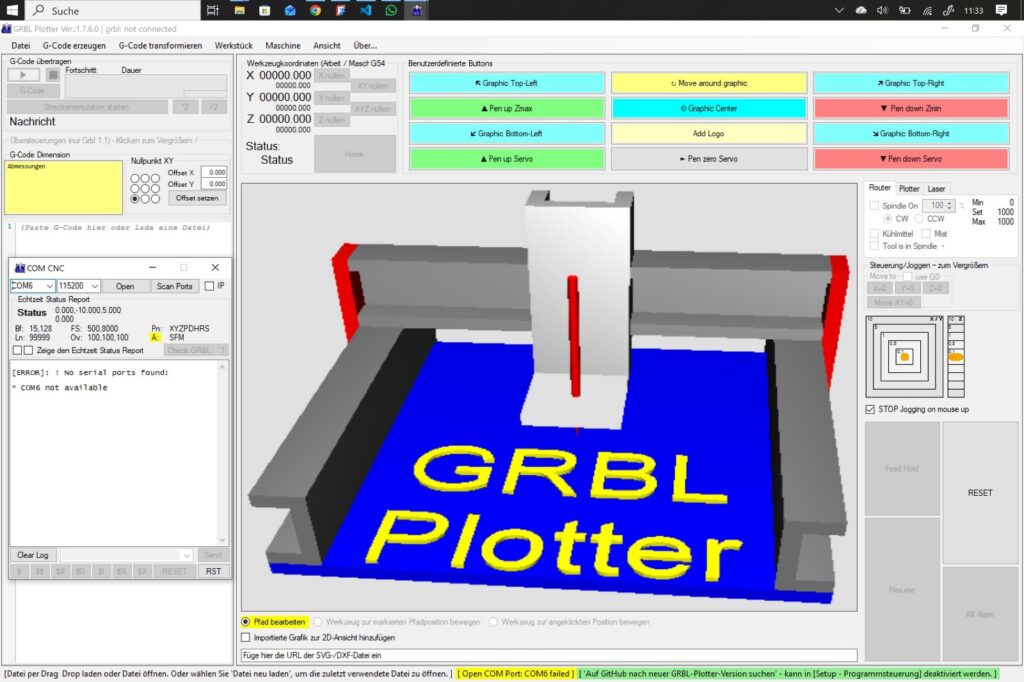
Steuerung mit GRBL
Die Ansteuerung erfolgt über eine GRBL-basierte Steuerungssoftware.
Über diese Schnittstelle werden:
- G-Code-Dateien geladen
- Referenzpunkte gesetzt
- manuelle Verfahrbewegungen ausgeführt
Die Software bildet die Verbindung zwischen digitalem Modell und realer Bewegung und machte für die Jugendlichen nachvollziehbar, wie Programmcode unmittelbar mechanische Abläufe steuert.
Fazit
Das Projekt war bewusst als Lernumgebung konzipiert.
Fehler, Umwege und notwendige Anpassungen waren kein Hindernis, sondern integraler Bestandteil des Entwicklungsprozesses.
Gerade das Zusammenspiel aus mechanischer Konstruktion, elektronischer Ansteuerung und softwareseitiger Integration führte zu einem tiefen Verständnis mechatronischer Systeme.
Der MakerSpace Schwerte zeigt damit, wie praxisnahe technische Bildung funktionieren kann – experimentell, praxisorientiert und gemeinschaftlich.